实验报告
实验1:RISC-V监控程序与Term命令
在模拟器中运行 RISC-V 监控程序的基本步骤如下:
启动监控程序
![Screen Shot 2022-09-14 at 2.07.46 PM]()
通过终端连接监控程序
![Screen Shot 2022-09-14 at 2.08.16 PM]()

Term 中几个命令的使用方法(以下对每个命令的介绍均来自supervisor-rv/文件夹中的README.md文件):
R:按照 x1 至 x31 的顺序返回用户程序寄存器值。![Screen Shot 2022-09-14 at 2.11.48 PM]()
D:显示从指定地址开始的一段内存区域中的数据。![Screen Shot 2022-09-14 at 2.12.15 PM]()
A:用户输入汇编指令,并放置到指定地址上![Screen Shot 2022-09-14 at 2.14.14 PM]()
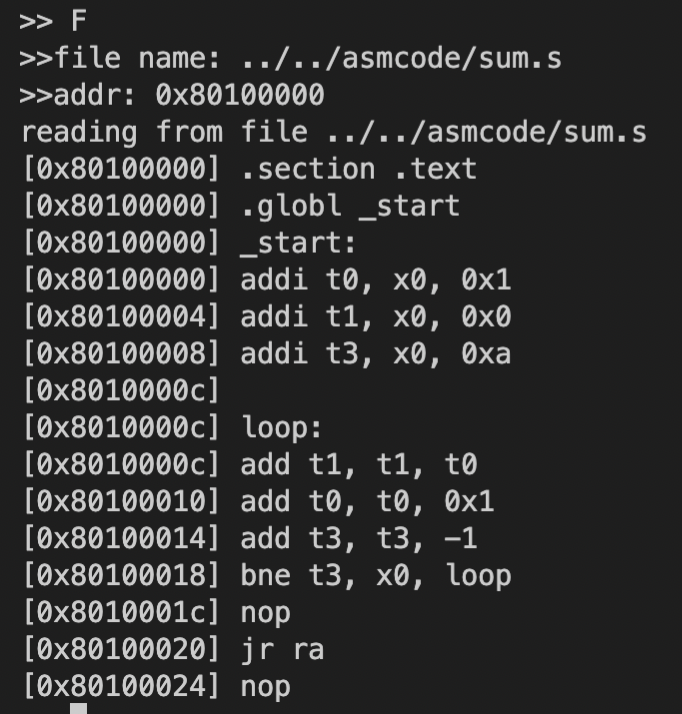
F:从文件读入汇编指令并放置到指定地址上,格式与 A 命令相同。![Screen Shot 2022-09-14 at 2.16.40 PM]()
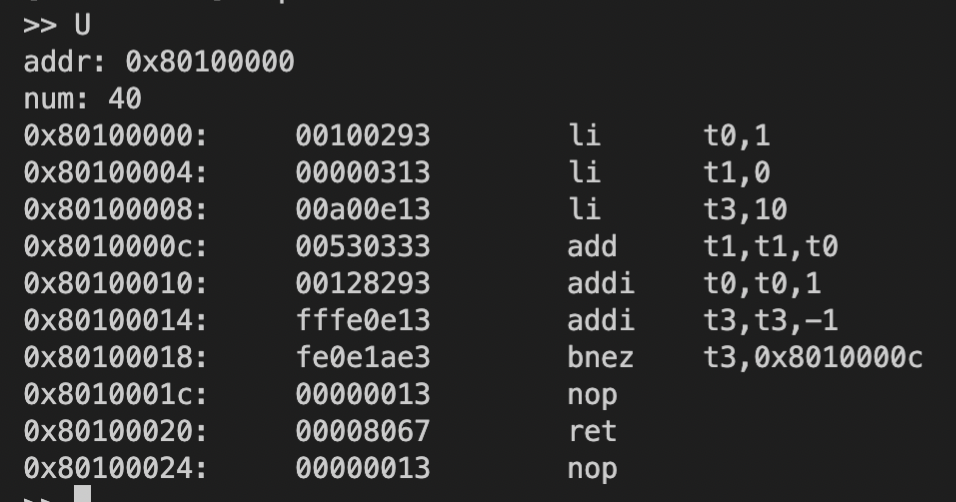
U:从指定地址读取一定长度的数据,并显示反汇编结果。![Screen Shot 2022-09-14 at 2.17.30 PM]()
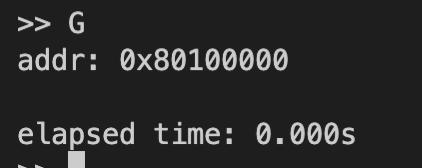
G:执行指定地址的用户程序。![Screen Shot 2022-09-14 at 2.17.54 PM]()
T:查看页表内容,仅在启用页表时有效。![Screen Shot 2022-09-14 at 2.18.30 PM]()
加上flag
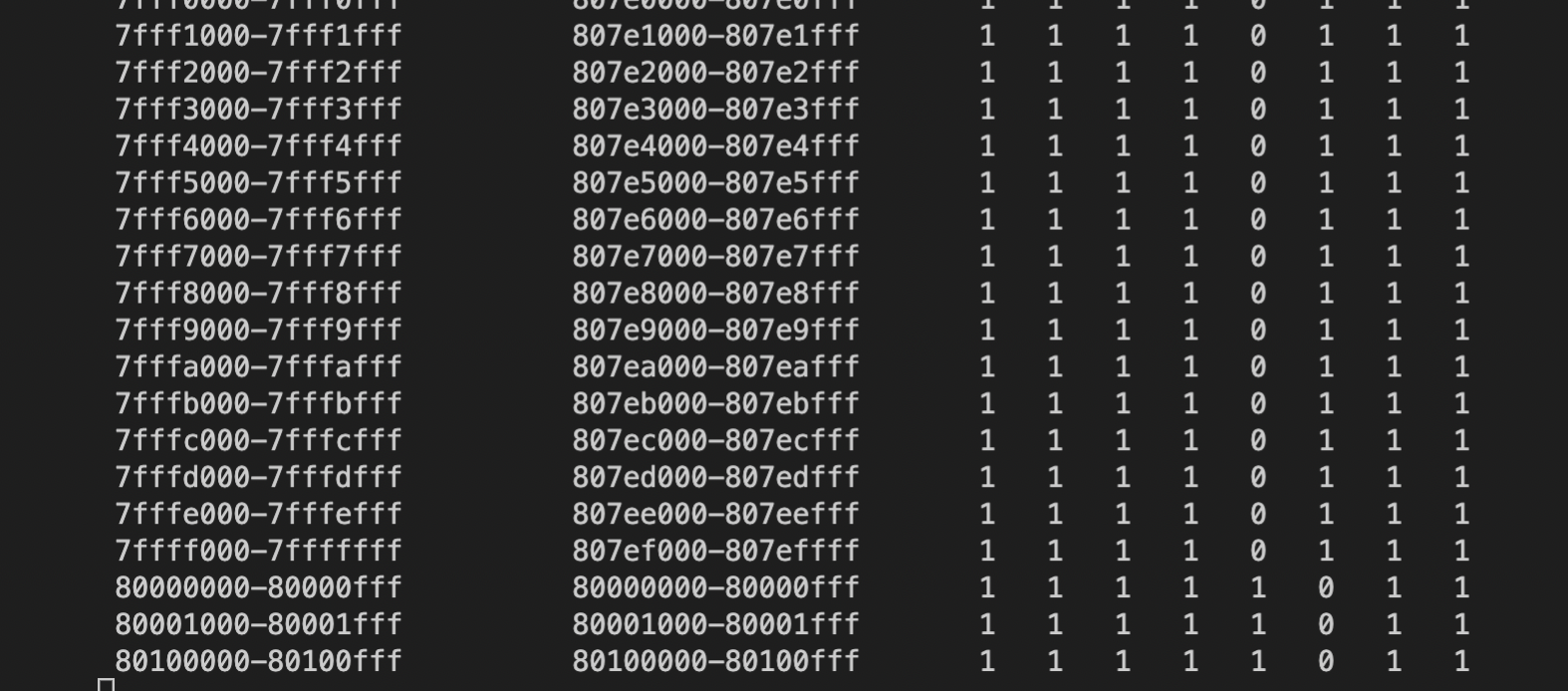
EN_PAGING=y来启动监控程序,以启用页表(以下是部分页表内容截图):![Screen Shot 2022-09-15 at 10.19.30 AM]()
![Screen Shot 2022-09-15 at 10.18.38 AM]()
Q:退出 Term。![Screen Shot 2022-09-14 at 2.19.51 PM]()


实验2:求前10个Fibonacci数
我的代码参考了asmcode/文件夹中sum.s与fib-mem.s代码。其中sum.s中采用循环的方式计算了$1 + 2 + … + 10$,在我的代码中也参考了这一循环loop的书写方式,通过一个计数器t3来控制是否完成了t4 = 10次的计算循环(事实上只需要进行8次循环即可,因为前2项Fib数是既定已给出的,无需计算)。fib-mem.s中比较关键的则是Fib数递推的步骤:根据递推式计算下一个Fib数add t2, t0, t1 # t2 = t0+t1,以及为下一轮递推做准备ori t0, t1, 0x0 # t0 = t1, ori t1, t2, 0x0 # t1 = t2,在我的代码中也参考了这一书写规范来进行Fib数的递推计算。
代码的总体思路分为以下几步:
- 初始化加数(第一个Fib数
t0,第二个Fib数t1),并设置好计数器相关变量(已计算次数t3、总共计算次数t4)、待写入地址t5; - 将前2个已知Fib数写入当前地址,并更新下一待写入地址;
- 通过循环,以计算Fib递推式计算下一个Fib数
t2 = t0 + t1,并在进入下一轮循环之前更新计算次数t3、待写入地址t5、新一轮递推的加数t0,t1,其中循环的终止条件为t3 == t4(即完成了t4次计算); - 达到循环的终止条件(或不再满足循环的执行条件
t3 != t4),返回,程序终止。
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
.global _start
.text
_start:
li t0, 0x1 # t0 = 1,加数(第1个Fib数)
li t1, 0x1 # t1 = 1,加数(第2个Fib数)
li t3, 0x2 # 已计算次数,用于计数(前2项已给出)
li t4, 0xA # t4 = 10,一共需计算前10个Fib数
li t5, 0x80400000 # 待写入的地址
sw t0, 0x0(t5) # 将第1个Fib数写入地址
sw t1, 0x4(t5) # 将第2个Fib数写入地址
addi t5, t5, 0x8 # 待写入地址自增
loop:
add t2, t0, t1 # t2 = t0 + t1,Fib数递推式
addi t3, t3, 0x1 # t3++,已计算次数自增
sw t2, 0x0(t5) # 将第t3个Fib数写入地址
addi t5, t5, 0x4 # 待写入地址自增
ori t0, t1, 0x0 # t0 = t1,为新一轮Fib数递推计算做准备
ori t1, t2, 0x0 # t1 = t2,同上
bne t3, t4, loop # 若没算完10个Fib数(t3 != t4),则通过loop继续计算
nop
jr ra # 否则(t3 == t4)返回,程序终止
nop
在supervisor-rv/kernel/目录下执行make sim启动监控程序,并在supervisor-rv/term/目录下执行python3 term.py -t 127.0.0.1:6666通过终端连接监控程序,并用>> F命令在监控程序中运行以上代码;通过>> D命令查看内存地址0x80400000~0x80400024,结果如下:
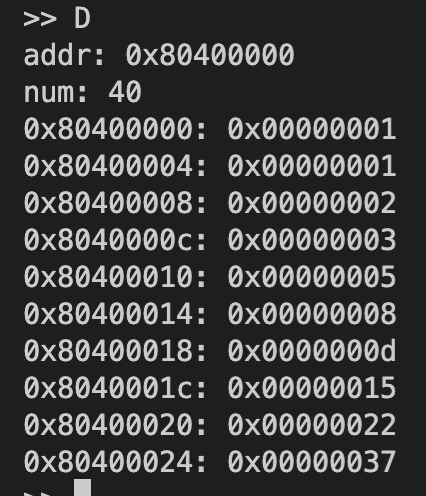
验证了存入起始地址为0x80400000的10个字中的数(16进制),与前10个Fibonacci数$1, 1, 2, 3, 5, 8, 13, 21, 34, 55$(十进制)一一对应,结果正确。
实验3:输出ASCII可见字符
我的代码参考了实验说明文档中提供的WRITE_SERIAL、.TESTW、.WSERIAL函数,以实现从终端输出字符。至于输出由0x21~0x7E共94个ASCII可见字符,采用循环的方式(94次循环)来进行输出,其中a0寄存器所存储的既是输出的对象(ASCII可见字符的十六进制编码)、又是计数器(由0x21开始计数到0x7E)。
代码的总体思路分为以下几步:
- 初始化循环开始字符
a0、结束字符t2,注意因为执行循环的边界条件判断为“不等”(bne a0, t2, WRITE_SERIAL # a0 != t2)而非“小于等于”(a0 <= t2),因此结束字符t2需要额外加一; - 通过循环,向终端(
0x10000000)输出a0寄存器中的最低字节,并在进入下一轮循环前更新a0的值(a0++,切换到下一顺位ASCII可见字符),其中循环的终止条件为a0 == t2(即完成了由0x21~0x7E所有ASCII可见字符的输出); - 达到循环的终止条件(或不再满足循环的执行条件
a0 != t2),返回,程序终止。
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
.section .text
.globl _start
_start:
li a0, 0x21 # 循环开始字符
li t2, 0x7E # 循环结束字符
addi t2, t2, 0x1 # .WSERIAL处bne边界条件
WRITE_SERIAL:
# 串口地址是 0x10000000
li t0, 0x10000000
# 轮询串口状态(0x10000005)
.TESTW:
lb t1, 5(t0)
# 判断是否可写
andi t1, t1, 0x20
beq t1, zero, .TESTW
.WSERIAL:
# 向终端(0x10000000)输出 a0 寄存器中的最低字节
sb a0, 0(t0)
addi a0, a0, 0x1 # a0++,切换到下一字符以输出
bne a0, t2, WRITE_SERIAL # 若未达到边界条件(a0 != t2)则继续输出ascii字符
nop
jr ra # 否则(a0 == t2)返回,终止程序
nop
同样启动监控程序,并通过终端连接监控程序,在监控程序中运行以上代码,得到结果:

成功向终端输出了ASCII 可见字符:
1
!"#$%&'()*+,-./0123456789:;<=>?@ABCDEFGHIJKLMNOPQRSTUVWXYZ[\]^_`abcdefghijklmnopqrstuvwxyz{|}~
实验4:求第60个Fibonacci数
与实验2基本一致,但由于第60个Fibonacci数已经超过了32位整型,因此需要在实验2的基础上作出一些修改,主要区别如下:
- 原先存储Fib数的3个32位寄存器
t0、t1、t2,改由6个32位寄存器存储,其中每个64位的整数由2个32位寄存器储存,即{a3, a2}储存第一个Fib数、{a5, a4}储存第二个Fib数、{a1, a0}用来储存由Fib递推式计算得到的下一个Fib数(高位为a3、a5、a1,低位为a2、a4、a0); - 计数器相关变量已计算次数
t3保持一致,而总共计算次数t4由10(0xA)改为60(0x3C); - 根据Fib递推式进行的加法运算,由原来的32位整型加法改为64位整型加法,此处参考了实验说明文档中提供的大位宽数据加法的实现方法;
- 为新一轮Fib数递推计算做准备,赋值时注意要把两个Fib加数的高位、低位寄存器都赋值(因此由原本的两个语句变为四个语句,每个加数各有两个待更新的寄存器需要被赋值);
- 只需将第60个Fib数写入制定内存地址即可,因此不再需要每次循环都写入一次地址,而只需要在退出循环之后,执行一次第60个Fib数
{a1, a0}的写入即可(注意低位a0写入0x80400000、高位a1写入0x80400004)。
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
.global _start
.text
_start:
li a1, 0x0 # {a1, a0} = {0, 0},初始化Fib数和
li a0, 0x0
li a3, 0x0 # {a3, a2} = {0, 1},初始化Fib数加数(第1个Fib数为1)
li a2, 0x1
li a5, 0x0 # {a5, a4} = {0, 1},初始化Fib数加数(第2个Fib数为1)
li a4, 0x1
li t3, 0x2 # 已计算次数,用于计数(前2项已给出)
li t4, 0x3C # t4 = 60,需计算到第60个Fib数
li t5, 0x80400000 # 待写入的地址
loop:
# {a3, a2} 即把低位保存在 a2,高位保存在 a3 的 64 位整数
# {a3, a2} + {a5, a4} = {a1, a0}
add a0, a2, a4
sltu a2, a0, a2
add a1, a3, a5
add a1, a2, a1
addi t3, t3, 0x1 # t3++,已计算次数自增
ori a3, a5, 0x0 # {a3, a2} = {a5, a4},为新一轮Fib数递推计算做准备
ori a2, a4, 0x0
ori a5, a1, 0x0 # {a5, a4} = {a1, a0},同上
ori a4, a0, 0x0
bne t3, t4, loop # 若没算到第60个Fib数(t3 != t4),则通过loop继续计算
nop
sw a0, 0x0(t5) # 否则(t3 == t4)将第60个Fib数{a1, a0}写入地址
sw a1, 0x4(t5)
jr ra # 返回,程序终止
nop
同样启动监控程序,并通过终端连接监控程序,在监控程序中运行以上代码(方法与实验2、3均一致,此处省略),得到结果:
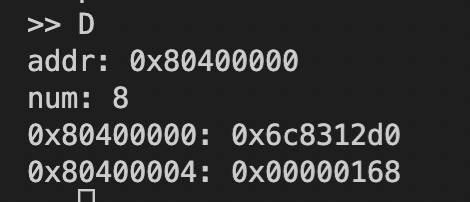
存入内存的结果0x1686c8312d0(十六进制)与第60个Fib数1548008755920(十进制)相同,结果正确。
代码分析报告
虽然在supervisor-rv/README.md文件中的“介绍”章节中写到“监控程序分为两个部分,Kernel和Term”,但鉴于实验说明文档中的要求是“撰写监控程序以及终端程序的代码分析报告”,以下均以实验说明文档中的说法为准,即监控程序代表Kernel、终端程序代表Term,而README.md文档中的“监控程序Supervisor”本质为一个简化的“操作系统”(即操作系统Supervisor分为监控程序Kernel和终端程序Term两个部分)。
在本次实验中,监控程序Kernel被运行在模拟环境QEMU中(QEMU模拟了RISC-V指令与系统,在后续实验中模拟环境QEMU将被物理实验平台替代),而我们需要通过终端程序Term与模拟环境QEMU中的监控程序Kernel进行交互,具体交互流程将在后续交互流程一节中阐释。以下将先分别给出监控程序Kernel与终端程序Term的代码分析。
监控程序Kernel
监控程序Kernel的代码在supervisor-rv/kernal/文件夹中:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
.
├── Makefile(编译规则)
├── debug(调试指令)
├── include(头文件)
│ ├── common.h(基本信息如使用32位或64位架构使用的访存指令与地址位数、用户栈初始化、各信号相关常量等)
│ ├── exception.h(异常相关的常量)
│ └── serial.h(串口相关的常量)
├── kern(监控程序Kernel核心代码!!!)
│ ├── evec.S(监控程序入口点)
│ ├── init.S(监控程序初始化)
│ ├── kernel32.ld(32位RISC-V的链接文件)
│ ├── kernel64.ld(64位RISV-V的链接文件)
│ ├── shell.S(监控程序的交互功能实现)
│ ├── test.S(监控程序的性能测试程序)
│ ├── trap.S(监控程序中涉及中断相关代码)
│ └── utils.S(通过串口进行读、写数据相关代码)
├── kernel.asm(make编译Kernel程序后生成的文件)
├── kernel.bin(make编译Kernel程序后生成的文件)
├── kernel.elf(make编译Kernel程序后生成的文件)
└── obj/(内含make编译Kernel程序后生成的文件)
核心代码均在kern/文件夹中,其中涉及到本次实验基础版本Kernel的文件为 evec.S 、 init.S 、 shell.S 、 utils.S 这4个文件。程序的结构为:
graph TD
subgraph evec.S
subgraph INITLOCATE
A[Kernel入口, 跳转到init.S: START]
end
end
A --> C
subgraph init.S
subgraph START
C[清空BSS段, 设置内核栈+用户栈+用户态程序sp和fp寄存器] --> D[配置串口等]
D --> D1[配置中断帧]
end
subgraph WELCOME
D1 --> D2[装入启动信息并打印]
D3[跳转到shell.S: SHELL, 开始交互]
end
end
D3 --> E
subgraph utils.S
subgraph WRITE_SERIAL_STRING
D2 --> H[写字符串: 将a0地址开始处的字符串写入串口]
H --> H1[调用串口写函数]
G[打印循环至 0 结束符]
end
subgraph WRITE_SERIAL
H1 --> H2[写串口: 将a0的低八位写入串口]
H2 --> H3[检测验证: 截取并查看串口状态的写状态位]
H3 -->|非零可写, 进入写|H3_1[写入寄存器a0中的值]
H3 -->|为零不可写, 忙等待|H3
H3_1 --> G
G --> D3
end
subgraph READ_SERIAL
F[读串口: 将读到的数据写入a0低八位]
F --> F1[检测验证: 截取并查看串口状态的读状态位]
F1 -->|非零可读, 进入读|F1_1[将串口中的值读取到寄存器a0]
F1 -->|为零不可读, 忙等待|F1
end
end
subgraph shell.S
subgraph SHELL
E[调用串口读函数, 读取操作符] --> F
F1_1 --> I[根据操作符进行不同的操作]
I -->|'R'|OP_R
I -->|'D'|OP_D
I -->|'A'|OP_A
I -->|'G'|OP_G
I -->|'T'|OP_T
I -->|其他, 主要指'W'|OP_OTHER
subgraph .OP_R
OP_R[打印用户空间寄存器]
end
subgraph .OP_D
OP_D[打印内存num个字节]
end
subgraph .OP_A
OP_A[写入内存num字节, num为4的倍数]
end
subgraph .OP_G
OP_G[跳转到用户程序执行]
end
subgraph .OP_T
OP_T[打印页表]
end
subgraph OTHER[错误反馈]
OP_OTHER[把XLEN写给term]
end
OP_R --> E
OP_D --> E
OP_A --> E
OP_G --> E
OP_T --> E
OP_OTHER --> E
end
end
由于shell.S中的具体操作(R、D、A、G、T)繁多,在上图中不一一分析具体实现方法,只取比较核心的G运行用户代码操作做详细分析,其代码结构如下(所有的循环i = 0, 1, 2, 3均是为了报告中书写方便,在实际代码中采用了直接书写四次代码实现):
graph TD
subgraph shell.S
subgraph .OP_G
OP_G1[获取用户程序地址]
OP_G2[从a0保存用户地址到s10]
OP_G2 --> OP_G3[写开始计时信号SIG_TIMERSET到串口, 通知Term开始运行]
OP_G4[定位用户空间寄存器备份地址] --> OP_G5[恢复用户程序调用前的寄存器数据]
OP_G5 --> OP_G6[重新获得当前监控程序栈顶指针]
OP_G6 --> OP_G7[写停止计时信号SIG_TIMETOKEN到串口, 通知Term结束计时, 调用WRITE_SERIAL过程与前述写SIG_TIMERSET一致, 此处省略]
end
end
OP_G1 --> READ1
OP_G3 --> WRITE
subgraph utils.S
subgraph READ_SERIAL_XLEN
READ1[调用READ_SERIAL_WORD函数]
end
READ1 --> READ2
subgraph READ_SERIAL_WORD
READ2[保存ra, s0-s3]
READ4[结果存入si, i++]
READ5[截取s0-s3的低8位] -->|第i次, i=0,1,2,3|READ6[存si的高8位到a0中, 再左移8位, i++]
READ6 -->|i<4|READ6
READ6 -->|i>=4|READ7[通过ra保存的返回地址返回]
end
READ2 -->|调用第i次, i=0,1,2,3|READ3
subgraph READ_SERIAL
READ3[读串口获得8位数据]
end
READ3 --> READ4
READ4 -->|i<4|READ3
READ4 -->|i>=4|READ5
READ7 --> OP_G2
subgraph WRITE_SERIAL
WRITE[检测验证+写串口, 同前述过程, 此处省略]
end
WRITE --> OP_G4
end
终端程序Term
终端程序的代码在supervisor-rv/term/term.py文件中,程序的结构为:
graph TD
subgraph main
main2[设置命令行参数]
main3[初始化失败, 程序终止]
main4[初始化成功, 进入Main函数]
end
main2 -->|检测tcp|TCP0.5
main4 --> Main1
subgraph InitializeTCP
TCP0[创建tcp_wrapper类的服务器ser]-->TCP0.5[连接kernel, 设置inp, outp]
end
TCP0.5 --> TCP1
subgraph tcp_wrapper
subgraph connect
TCP1[通过python的stdlib中的socket模块connect函数, 连接TCP服务器kernel的host+port]
end
subgraph read
TCP_read[通过stdlib中的socket模块recv函数, 8位8位读取串口数据]
end
subgraph write
TCP_write[通过stdlib中的socket模块send函数, 8位8位写入串口数据]
end
end
TCP1 -->|连接成功|main3
TCP1 -->|连接失败|main4
Main0 --> TCP_read
TCP_read --> Main1
subgraph Main
Main0[通过inp.read读取串口, 获得kernel发来的欢迎信息与xlen信息]
Main1[输出, 并进入MainLoop函数]
end
Main1 --> ML1
subgraph Mainloop
ML1[根据用户在命令行中的指令cmd, 执行不同操作]
ML1-->|'A'|A
ML1-->|'F'|F
ML1-->|'R'|R
ML1-->|'D'|D
ML1-->|'U'|U
ML1-->|'G'|G
ML1-->|'T'|T
ML1-->|'Q'|Q
subgraph run_A
A[用户输入汇编指令, 并放置到指定地址上]
end
subgraph run_F
F[从文件读入汇编指令并放置到指定地址上]
end
subgraph run_R
R[返回用户程序寄存器值]
end
subgraph run_D
D[显示从指定地址开始的一段内存区域中的数据]
end
subgraph run_U
U[从指定地址读取一定长度的数据, 并显示反汇编结果]
end
subgraph run_G
G[执行指定地址的用户程序]
end
subgraph run_T
T[查看页表内容, 仅在启用页表时有效]
end
Q[退出Term]
A-->ML2
F-->ML2
R-->ML2
D-->ML2
U-->ML2
G-->ML2
T-->ML2
ML2[通过outp.write写入串口, 通知kernel执行该命令]-->TCP_write
TCP_write --> ML1
end
交互流程
Kernel和Term通过串口进行交互,即用户在Term中输入的命令、代码在经过 Term 处理后通过串口传输给 Kernel,而Kernel需要输出的信息也会通过串口传输到Term并展示给用户。在这里是使用QEMU模拟串口,其地址如README.md文件所描述的:
设置了一个内存以外的地址区域,用于串口收发。串口控制器按照 16550 UART 的寄存器 的子集实现,访问的代码位于
kern/utils.S,其部分数据格式为:
地址 位 说明 COM1= 0x10000000[7:0] 串口数据,读、写地址分别表示串口接收、发送一个字节 COM1 + COM_LSR_OFFSET= 0x10000005[5] 只读,为1时表示串口空闲,可发送数据 COM1 + COM_LSR_OFFSET= 0x10000005[0] 只读,为1时表示串口收到数据
意思是不论是Kernel要读写数据(从/给Term读/写),还是Term要读写数据(从/给Kernel读/写),二者均需要在判断0x10000005地址处的相关检验位(可写位是第5位,可读位是第0位)为1时,从0x10000000读/写8位的数据。一个重要的例子是,在前面针对监控程序Kernel的代码分析中,分析过的Term向Kernel发送用户代码的32位地址数据时(Term写、Kernel读),二者均需在判断可写/读时每次仅进行8位的数据交互,共4次,Kernel读到这4个8位的数据还需通过依次放入目标寄存器再左移的方法复原32位数据,实现完整的32位地址数据交互。
在Kernel中交互主要的代码块在utils.S中,包含向串口写入数据的 WRITE_SERIAL 、 WRITE_SERIAL_WORD 、 WRITE_SERIAL_XLEN 、 WRITE_SERIAL_STRING 函数,以及从串口读入数据的 READ_SERIAL 、 READ_SERIAL_WORD 、 READ_SERIAL_XLEN 函数。其中 WRITE_SERIAL_WORD 、 WRITE_SERIAL_XLEN 、 WRITE_SERIAL_STRING 均是基于 WRITE_SERIAL 函数(内部根据写出的数据大小,选择调用对应次数的 WRITE_SERIAL 函数),READ_SERIAL_WORD 、 READ_SERIAL_XLEN 均是基于 READ_SERIAL 函数(内部根据读入的数据大小,选择调用对应次数的 WRITE_SERIAL 函数)。对于串口地址、串口检验地址等常量均定义在include/serial.h中。
而 WRITE_SERIAL 和 READ_SERIAL 的核心内容,总结如下:
- 判断检验位:将判断地址
0x10000005处的数据通过lb指令读到t1寄存器中,再通过andi运算(WRITE_SERIAL中为t1 = t1 & COM_LSR_THRE = t1 & 0x20即t1 = t1 & 0b00100000截取第5位检验位是否可写;READ_SERIAL中为t1 = t1 & COM_LSR_DR = t1 & 0x01即t1 = t1 & 0b00000001截取第1为检验位是否可读)截取检验位并判断是否可写/可读(可写/可读计算为1,不可写/不可读为0); - 根据检验位的合法性决定下一步执行动作(条件跳转
bne):若检验位不合法(为0)则通过循环判断检验位代码的方法实现“忙等待”,不断“轮询串口状态”直到合法(为1);若检验位合法(为1)则直接顺序执行后面的代码(真正执行读/写到串口的代码); - 读/写:通过
sb(WRITE_SERIAL,写)、lb(READ_SERIAL,读)向/从串口地址0x10000000读/写数据。
这种通过 sb、lb 等内存访问指令来实现的对于串口的访问,实际是访问的外设寄存器,这种访问方式叫做MMIO(内存映射 IO)。
在Term中交互主要的代码块在term.py文件里class tcp_wrapper中定义的write函数与read函数,函数实现是基于Python的stdlib库中socket模块的send、recv函数。虽然不确定socket模块的send、recv函数具体是如何实现的,但根据Kernel在utils.S中的读 READ_SERIAL /写 WRITE_SERIAL 函数每次只读取/写入0x10000000地址8位数据,推测Term中调用的socket模块的send、recv函数也需要判断检验位后每次向串口地址0x10000000读/写8位数据。
思考题目
比较 RISC-V 指令寻址方法与 x86 指令寻址方法的异同。
RISC-V指令寻址方法只有一种(立即数与存放基址的寄存器相加,即基址+偏移量寻址),而x86指令寻址方法繁多(包含立即数寻址、寄存器寻址、绝对寻址、间接寻址、基址+偏移量寻址、2种变址寻址、4种比例变址寻址)。
RISC-V只有load, store访存指令(
lb,lw,sb,sw等)可以访问内存,而x86基本所有指令(如移动指令mov、算术指令add等,以及x86本身的访存指令)均可以访问内存。阅读监控程序,列出监控程序的 19 条指令,请根据自己的理解对用到的指令进行分类,并说明分类原因。
19条指令(参考了《RISC-V手册》):
指令 描述 具体含义 add rd, rs1, rs2 x[rd] = x[rs1] + x[rs2] 把寄存器 x[rs2]加到寄存器x[rs1]上,结果写入x[rd](忽略算术溢出) addi rd, rs, imm x[rd] = x[rs] + sext(imm) 把符号位扩展的立即数加到寄存器x[rs]上,结果写入x[rd](忽略算术溢出) and rd, rs1, rs2 x[rd] = x[rs1] & x[rs2] 将寄存器 x[rs1]和寄存器x[rs2]位与的结果写入x[rd] andi rd, rs, imm x[rd] = x[rs] & sext(imm) 把符号位扩展的立即数和寄存器x[rs]上的值进行位与,结果写入x[rd] auipc rd, imm x[rd] = pc + sext(imm[31:12] « 12) 把符号位扩展的20位(左移12位)立即数加到pc上,结果写入x[rd] beq rs1, rs2, offset if (x[rs1] == x[rs2]) pc += sext(offset) 若寄存器x[rs1]和寄存器x[rs2]的值相等,把pc的值设为当前值加上符号位扩展的偏移offset bne rs1, rs2, offset if (x[rs1] ≠ x[rs2]) pc += sext(offset) 若寄存器x[rs1]和寄存器x[rs2]的值不相等,把pc的值设为当前值加上符号位扩展的偏移offset jal rd, offset x[rd] = pc+4; pc += sext(offset) 把下一条指令的地址(pc+4)写入x[rd],然后把pc设置为当前值加上符号位扩展的offset jalr rd, offset(rs) t=pc+4; pc=(x[rs]+sext(offset))&~1; x[rd]=t 把pc设置为x[rs]+sext(offset),把计算出的地址的最低有效位设为 0,并将原pc+4的值写入x[rd](rd默认为x1) lb rd, offset(rs) x[rd] = sext(M[x[rs] + sext(offset)][7:0]) 从地址x[rs]+sext(offset)读取一个字节(8位),经符号位扩展后写入x[rd] lui rd, imm x[rd] = sext(imm[31:12] « 12) 将符号位扩展的20位立即数imm左移12位,写入x[rd]中(低12位置零) lw rd, offset(rs) x[rd] = sext(M[x[rs] + sext(offset)][31:0]) 从地址x[rs]+sext(offset)读取四个字节,写入x[rd] or rd, rs1, rs2 x[rd] = x[rs1] | x[rs2] 把寄存器x[rs1]和寄存器x[rs2]按位取或,结果写入x[rd] ori rd, rs, imm x[rd] = x[rs] | sext(imm) 把寄存器x[rs]和符号扩展的立即数imm按位取或,结果写入x[rd] sb rs2, offset(rs1) M[x[rs1] + sext(offset)] = x[rs2][7:0] 将x[rs2]的低8位存入内存地址x[rs1]+sext(offset) slli rd, rs, shamt x[rd] = x[rs] « shamt 把寄存器x[rs]逻辑左移shamt位,空出的位置填入0,结果写入x[rd](对于RV32I,仅当shamt[5]=0时,指令才有效) srli rd, rs, shamt x[rd] = x[rs] » shamt 把寄存器x[rs]逻辑右移shamt位,空出的位置填入0,结果写入x[rd](对于RV32I,仅当shamt[5]=0时,指令才有效) sw rs2, offset(rs1) M[x[rs1] + sext(offset)] = x[rs2][31:0] 将x[rs2]的低位4个字节存入内存地址x[rs1]+sext(offset) xor rd, rs1, rs2 x[rd] = x[rs1] ^ x[rs2] x[rs1]和x[rs2]按位异或,结果写入x[rd] x[id]表示编号为id的寄存器,rd表示destination register目标寄存器的编号,rs表示source register源寄存器的编号,sext表示sign-extend符号位扩展,imm表示immediate立即数,pc表示program counter程序计数器寄存器,offset为立即数形式的偏移量,M[address]表示地址为address的内存空间,shamt为立即数形式的位移量。
分类:
分类 指令 原因 整数计算指令 ADD, ADDI, AND, ANDI, SLLI, SRLI, OR, ORI, XOR, LUI, AUIPC 需要调用ALU,包含算术指令(ADD, ADDI)、逻辑指令(AND, ANDI, OR, ORI, XOR)、移位指令(SLLI, SRLI)、其他(向PC高位加上立即数的AUIPC, 加载立即数到高位的LUI) 条件分支指令 BEQ, BNE 根据比较结果进行分支跳转 无条件跳转指令 JAL, JALR 实现无条件的跳转并链接 访存指令 LB, LW, SB, SW 从/向内存加载、存储数据 结合 term 源代码和 kernel 源代码说明 term 是如何实现用户程序计时的。
主要思路是,Kernel获得用户程序地址后通过串口发送开始计时信号
SIG_TIMERSET来通知Term用户程序开始运行,Term处开始计时(记录开始时间),Kernel执行完用户程序并复原调用用户代码前的寄存器、栈顶指针后通过串口发送停止计时信号SIG_TIMETOKEN来通知Term用户程序结束运行,Term处停止计时并获得用户程序运行时间(计算结束时间与先前记录的开始时间之差)。具体流程为:
- Term在
term.py文件中的run_G函数中,将指令G与用户程序代码所在的8位内存地址通过串口写给Kernel; - Kernel在
shell.S文件的SHELL函数中从串口中读入Term发来的G指令并跳转到.OP_G子函数中,再从串口中读入Term发来的用户程序代码所在的8位内存地址并保存到s10寄存器,然后在执行用户程序(跳转到s10所存内存地址处)之前,通过串口向Term写入开始计时信号SIG_TIMERSET(即0x06,在ASCII中表示ACK,为不可见ASCII字符); - Term通过串口读入Kernel发来的数据,并判断是否为约定好的开始计时信号
SIG_TIMERSET(即0x06),若是则通过time_start = timer()开始计时(记录开始时间); - Kernel此时写入返回地址
la ra, .USERRET2到ra后开始执行用户程序,即jr s10跳转到用户程序所在的内存地址s10处,同时Term通过while True:循环不断判断从串口处读入的数据是否是约定好的停止计时信号SIG_TIMETOKEN(即0x07,在ASCII中表示BEL,为不可见ASCII字符)—— - 若Term读入的不是停止计时信号
SIG_TIMETOKEN(且也不是超时信号SIG_TIMEOUT即0x81)则默认为Kernel向Term发送的待输出到终端的可见字符,调用output_binary函数将其输出到终端; - 直到Kernel执行完用户程序(进入
.USERRET2子函数并完成调用用户程序之前的寄存器、栈顶指针复原),通过串口向Term写入停止计时信号SIG_TIMETOKEN; - 因此此时Term再通过
while循环从串口读入的就是停止计时信号SIG_TIMETOKEN(即0x07),终止while循环并通过elapse = timer() - time_start停止计时并获得用户程序运行时间(计算结束时间与先前记录的开始时间之差)。
- Term在
说明 kernel 是如何使用串口的(在源代码中,这部分有针对 FPGA 与 QEMU 两个版本的代码,任选其一进行分析即可)。
如
supervisor-rv/kernel/include/serial.h文件中定义的,FPGA与QEMU的串口地址常量均由COM1表示、串口的寄存器地址间隔均由COM_MULTIPLY表示、串口是否可读/可写的判断地址相对于串口地址的偏移量均由COM_LSR_OFFSET表示(即判断可读/可写状态位的判断地址实际为COM1 + COM_LSR_OFFSET)、写状态位均由COM_LSR_THRE表示、读状态位均由COM_LSR_DR表示。详见上一章代码分析报告中交互流程一节,以QEMU为例(即
COM1 = 0x10000000,COM_MULTIPLY = 1, ` COM_LSR_OFFSET = 5,COM_LSR_THRE = 0x20,COM_LSR_DR = 0x01)分析了Kernel如何使用串。(FPGA相应的各常量为COM1 = AXI Uart16550的基地址 + 0x10000,COM_MULTIPLY = 4,COM_LSR_OFFSET = 20,COM_LSR_THRE = 0x20,COM_LSR_DR = 0x01`)。请问 term 如何检查 kernel 已经正确连入,并分别指出检查代码在 term 与 kernel 源码中的位置。
检查代码在Term源码中的
term.py文件main函数调用InitializeTCP函数中ser.connect(host, int(port))语句,其中ser是类tcp_wrapper的对象,tcp_wrapper的成员函数connect内部实际上调用了Python的stdlib库中socket模块所定义的connect函数。检查代码在Kernel源码中的
shell.S文件SHELL函数li a0, XLEN与jal WRITE_SERIAL指令(后续又跳转到utils.S文件WRITE_SERIAL函数以将XLEN写入串口给Term)。Term如何检查Kernel已经正确连入,分析如下——
观察Term连接Kernel的过程:
1 2 3 4
➜ kernel git:(master) ✗ make sim riscv64-unknown-elf-ld obj/evec.o obj/init.o obj/shell.o obj/test.o obj/trap.o obj/utils.o -Tkern/kernel32.ld qemu-system-riscv32 -M virt -m 32M -kernel kernel.elf -nographic -monitor none -serial tcp::6666,server -s -bios none qemu-system-riscv32: -serial tcp::6666,server: info: QEMU waiting for connection on: disconnected:tcp::::6666,server=on
1 2 3 4 5
➜ term git:(master) ✗ python3 term.py -t 127.0.0.1:6666 connecting to 127.0.0.1:6666...connected MONITOR for RISC-V - initialized. running in 32bit, xlen = 4 >>
完整连接过程(包含检查是否正确连入)分为以下几步:
- 一旦启动Kernel(执行
make sim指令),Kernel就已经完成evec.S与init.S中代码的运行(此处包含①各种必要的初始化,②通过模拟器QEMU设置好的host为本机、端口为6666的TCP服务器以等待Term的连接并配置好串口,③以及向串口写入定义为monitor_version的文本数据"MONITOR for RISC-V - initialized."——注意此处只是向串口写入,Term并没有读取该数据,Term甚至还没有连接上Kernel呢),并进入shell.S中SHELL函数中,第一行的jal READ_SERIAL跳转到utils.S的读操作符函数中,忙等待Term在连接上Kernel之后通过串口向Kernel发送操作符W,好让Kernel通过串口把XLEN写给Term(注意此处Kernel一直卡在函数READ_SERIAL中的子函数.TESTR进行轮询检测验证,因为Term此时还没给Kernel发送任何数据,因此串口检测地址的可读位始终为0,Term甚至还没连接上Kernel呢); - 反观Term,由用户在终端敲入
python3 term.py -t 127.0.0.1:6666命令,Term在term.py的main函数中通过args = parser.parse_args()从命令行读入args.tcp = 127.0.0.1:6666,并作为参数host_port传入InitializeTCP(host_port)函数; - 在
InitializeTCP函数中,若用户输入的host_port不满足host与port的正则表达式,则直接返回到main函数中输出print('Failed to establish TCP connection')退出程序,也就是完全没有执行任何连接相关操作; - 若用户输入的
host_port在语法上是合法的,则Term创建tcp_wrapper类的ser = tcp_wrapper()对象,在终端输出"connecting to 127.0.0.1:6666...",并调用socket模块(Python的stdlib库自带模块)的ser.connect(host, int(port))连接函数进行连接与检查是否正确连入的操作(若连接成功则顺序执行print("connected")输出连接成功,若连接失败则由socket库的connect函数提供报错信息如ConnectionRefusedError: [Errno 61] Connection refused并退出程序); - 连接成功后(终端输出
"connected"),Term跳转到Main函数,通过inp.read从串口中读入步骤1.中Kernel往串口中写入的monitor_version文本数据,并打印在终端; - 然后Term再向串口
outp.write(b'W')写入操作符W,如步骤1.所提到的,Kernel在READ_SERIAL函数中的子函数.TESTR轮询进行检测验证,终于验证到了可读位为1(因为Term终于向Kernel发送了数据W,串口检测地址的可读位从0变成1),顺序执行读取操作符W,并返回到SHELL函数中,执行li a0, XLEN与jal WRITE_SERIAL,即将机器字长XLEN(版本号)通过串口写给Term,该功能作为检查是否正确连入的标志,之后Kernel将等待Term从串口发来的Term命令; - Term读取串口
xlen = ord(inp.read(1))获得机器字长并输出到终端"running in 32bit, xlen = 4",随后进入MainLoop函数由用户输入Term命令,后续再与Kernel交互,不再阐释。
- 一旦启动Kernel(执行